DIYPNP install: inital tuning


 11-14-2011, 06:09 AM
11-14-2011, 06:09 AM
#442
Junior Member
Thread Starter

Join Date: Jun 2007
Posts: 411
Total Cats: 0
I redid my idle valve test and made a scatter plot:
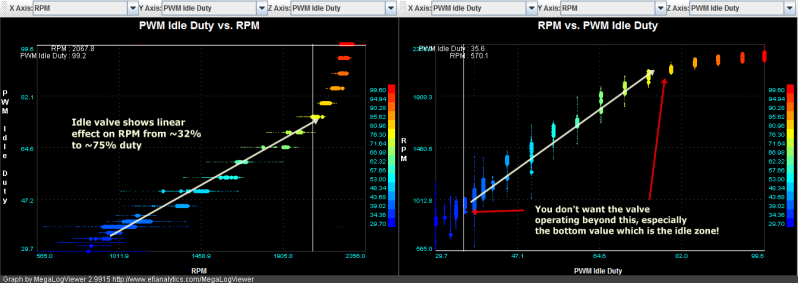
Fixed timing at 10 for the whole test.
I think everyone should test their own idle valves and figure out the duty range where the change in RPM is linear. And make sure the valve is only working in that area. Otherwise, closed loop calculations will be wrong. The bottom value is important because that will be most involved during idle.
I will retest the lower end of the spectrum. My cams were making it hard to get a stable reading at low RPMs.
Anyway, again, it is a useful test that everyone should do. It also determines your values for minimum and maximum valve duty and the corresponding RPMs, so you can enter realistic values into your setup.
Fixed timing at 10 for the whole test.
I think everyone should test their own idle valves and figure out the duty range where the change in RPM is linear. And make sure the valve is only working in that area. Otherwise, closed loop calculations will be wrong. The bottom value is important because that will be most involved during idle.
I will retest the lower end of the spectrum. My cams were making it hard to get a stable reading at low RPMs.
Anyway, again, it is a useful test that everyone should do. It also determines your values for minimum and maximum valve duty and the corresponding RPMs, so you can enter realistic values into your setup.
Last edited by Greg G; 11-14-2011 at 07:44 AM.

Reply
 0
0

0
 11-14-2011, 08:09 AM
11-14-2011, 08:09 AM
#445
Elite Member
iTrader: (1)

Join Date: Jun 2006
Location: Warrington/Birmingham
Posts: 2,642
Total Cats: 42
Exactly, but a portion of the valve's cycle is linear so you setup the valve's 'closed' position to be above it's lower non-linear region, and vis versa for the open value.
Ergo you're only using the linear portion of the valves operation.
Ergo you're only using the linear portion of the valves operation.
Reply
0
0
12-22-2011, 04:06 AM
#449
Junior Member
Thread Starter
Join Date: Jun 2007
Posts: 411
Total Cats: 0
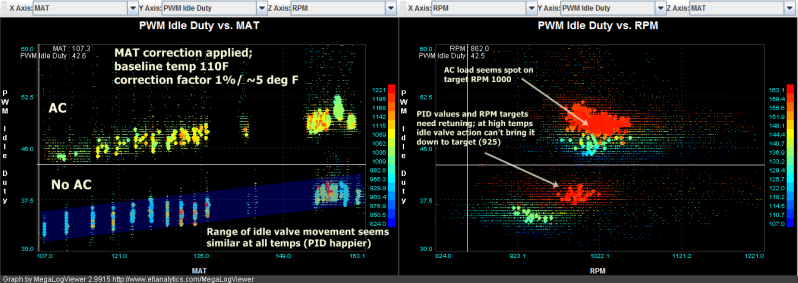
So with 3.2.1 gslender v2 release, idle is now pretty much solid.
I just don't understand why the AC electrical load has a bigger impact than the fan load, when the fan voltage drop is deeper! Not really a big deal, since it's a 30-40 rpm drop for a split second...but we've gotten this far by me not being satisfied eh?
I just don't understand why the AC electrical load has a bigger impact than the fan load, when the fan voltage drop is deeper! Not really a big deal, since it's a 30-40 rpm drop for a split second...but we've gotten this far by me not being satisfied eh?
Reply
0
0
 03-10-2012, 10:23 PM
03-10-2012, 10:23 PM
#453
Junior Member
Thread Starter
Join Date: Jun 2007
Posts: 411
Total Cats: 0
Bump for 2012!
Latest gslender FW here:
http://www.msextra.com/forums/viewto...p?f=91&t=44289
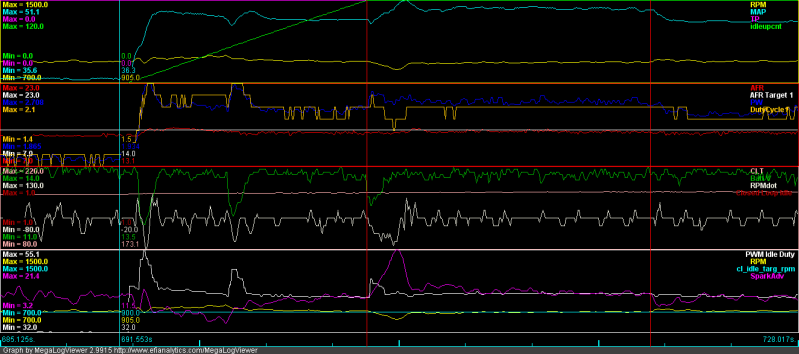
This is what my MAP, MAPDOT, Tps, and tpsDOT look like with the new oversampling feature turned on, lag factors at 100%! Tested a prerelease version without the extra tpsDOT smoothing- so smooth as it may look now, it will get even smoother! The dynamic dashpot seems to be working- it ramps down to the IVT table value, allowing a smoother transition from throttle lift to CL idle.
Adaptive PID reduction allows us to define a zone above and below target, within which a reduction factor is applies to the values of P, I, and D. This factor is set in a 2x5 curve. This allows the user to set aggressive PID values for a strong response far from target, but ramp it down as target is approached. Works very well in combination with AIA. The working theory is that, near target, the idle valve response is too coarse and too slow, so it's better kept relatively quiet, letting Adaptive Idle Advance do the fine tuning.
For those clamoring for an absolute dead zone, you can do just that!
Another nice feature is you can set it up to have an asymmetric response, more aggressive below target.
This log shows the effect of running 0 reduction factor- valve is much quieter than without. Sorry, the small movements are from my voltage correction, it should be even flatter. I am also running a rather small window size, maybe it should be larger fore more transition/ramp.
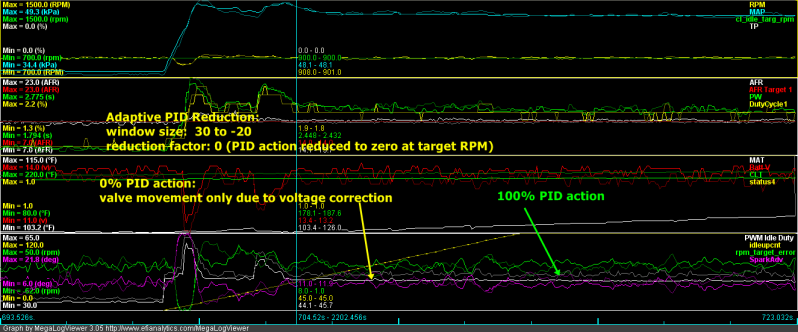
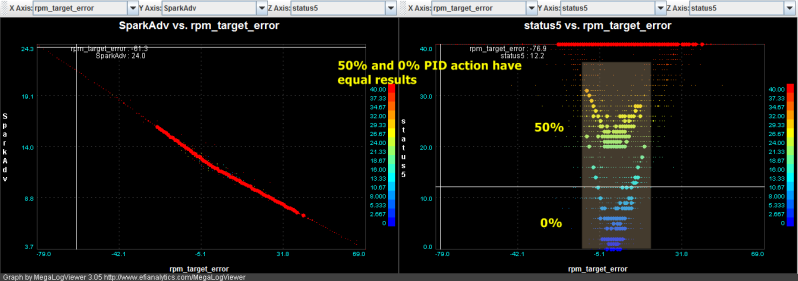
Status 5 indicates the value of P (so we can log Adaptive PID Reduction)- for the 50%, you see that the value of P (40) is reduced to 20 (at the bottom of the V). For the reduction factor of zero, we actually end up with a P value of zero at target! The width of the V and the clustering of the dots at the valley show how closely the RPMs stick to target. The red line up top shows no PID reduction applied.
Another small but nice improvement is the separation of the battery v from the temperature sensor filters (MAT & CLT). This lets me use heavier smoothing on CLT and MAT, and less on the battery voltage (for less lag and marginally faster --every bit helps-- voltage correction response.)
Latest gslender FW here:
http://www.msextra.com/forums/viewto...p?f=91&t=44289
This is what my MAP, MAPDOT, Tps, and tpsDOT look like with the new oversampling feature turned on, lag factors at 100%! Tested a prerelease version without the extra tpsDOT smoothing- so smooth as it may look now, it will get even smoother! The dynamic dashpot seems to be working- it ramps down to the IVT table value, allowing a smoother transition from throttle lift to CL idle.
Adaptive PID reduction allows us to define a zone above and below target, within which a reduction factor is applies to the values of P, I, and D. This factor is set in a 2x5 curve. This allows the user to set aggressive PID values for a strong response far from target, but ramp it down as target is approached. Works very well in combination with AIA. The working theory is that, near target, the idle valve response is too coarse and too slow, so it's better kept relatively quiet, letting Adaptive Idle Advance do the fine tuning.
For those clamoring for an absolute dead zone, you can do just that!
Another nice feature is you can set it up to have an asymmetric response, more aggressive below target.
This log shows the effect of running 0 reduction factor- valve is much quieter than without. Sorry, the small movements are from my voltage correction, it should be even flatter. I am also running a rather small window size, maybe it should be larger fore more transition/ramp.
Status 5 indicates the value of P (so we can log Adaptive PID Reduction)- for the 50%, you see that the value of P (40) is reduced to 20 (at the bottom of the V). For the reduction factor of zero, we actually end up with a P value of zero at target! The width of the V and the clustering of the dots at the valley show how closely the RPMs stick to target. The red line up top shows no PID reduction applied.
Another small but nice improvement is the separation of the battery v from the temperature sensor filters (MAT & CLT). This lets me use heavier smoothing on CLT and MAT, and less on the battery voltage (for less lag and marginally faster --every bit helps-- voltage correction response.)
Reply
0
0
04-14-2012, 02:21 AM
#454
Junior Member
Thread Starter
Join Date: Jun 2007
Posts: 411
Total Cats: 0
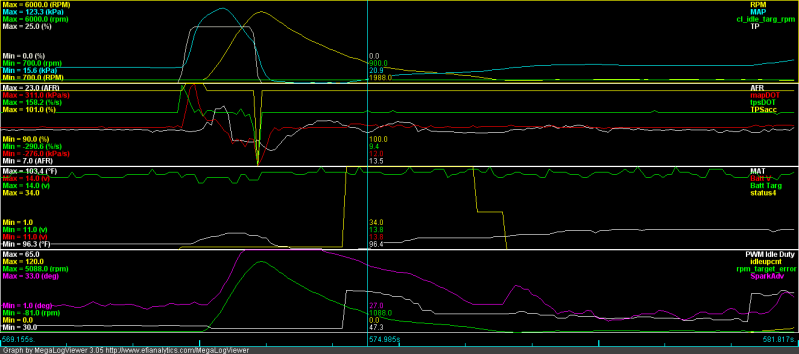
Beating that dead horse dead dead dead!
Here's where I am now.
Here's a pic of MS2/Extra 3.3.0b gslender 2.4.5 (prerelease), and how it all comes together to produce this OEM quality idle, even on my worst-case scenario setup
Here's where I am now.
Here's a pic of MS2/Extra 3.3.0b gslender 2.4.5 (prerelease), and how it all comes together to produce this OEM quality idle, even on my worst-case scenario setup
Reply
0
0
04-14-2012, 11:58 AM
#457
Elite Member

Join Date: Jul 2005
Posts: 6,420
Total Cats: 84
Great work G & G!
It's a "nonlinear" PID multiplier, and nonlinear advance correction, not "adaptive".
Adaptive control systems self-learn and adjust their parameters on-the-fly as the system ages or otherwise changes:

http://en.wikipedia.org/wiki/Adaptive_control
It's a "nonlinear" PID multiplier, and nonlinear advance correction, not "adaptive".
Adaptive control systems self-learn and adjust their parameters on-the-fly as the system ages or otherwise changes:
http://en.wikipedia.org/wiki/Adaptive_control
Adaptive control is the control method used by a controller which must adapt to a controlled system with parameters which vary, or are initially uncertain. For example, as an aircraft flies, its mass will slowly decrease as a result of fuel consumption; a control law is needed that adapts itself to such changing conditions.
Last edited by JasonC SBB; 04-14-2012 at 12:31 PM.
Reply
0
0
04-14-2012, 06:03 PM
#458

Great work G & G!
It's a "nonlinear" PID multiplier, and nonlinear advance correction, not "adaptive".
Adaptive control systems self-learn and adjust their parameters on-the-fly as the system ages or otherwise changes:
http://en.wikipedia.org/wiki/Adaptive_control
It's a "nonlinear" PID multiplier, and nonlinear advance correction, not "adaptive".
Adaptive control systems self-learn and adjust their parameters on-the-fly as the system ages or otherwise changes:
http://en.wikipedia.org/wiki/Adaptive_control
G
Reply
0
0

Thread
Thread Starter
Forum
Replies
Last Post
Mikel
MEGAsquirt
4
09-28-2015 04:46 PM







