Scarlet
 04-08-2019, 04:24 PM
04-08-2019, 04:24 PM
#101
Junior Member
Thread Starter

Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
They make T6 in 15w40 now???!!! Well I just changed my oil but Im going to drain it and put this in instead, lol. I run T6 5w40 but with hotter weather coming a little thicker would be nice. I think youll like the squaretop for sure, at least I hope you do sounds like the install was a PITA
If you use the built-in tool for setting WUE, TS does exactly what you suggest, it tunes WUE to your target. Since idle is so fickle, when I ran the wizard (long time ago), I put IAC to manual and ran the car at about 2000 RPM for setting WUE. Anyway, point is that most people run the wizard, and it does set WUE at target. So, in the end WUE gives extra fuel at low CLT, but only to overcome poor atomization / evaporation, not to target an actual rich mixture with respect to AFR. Again, this is not like OEM, but seems to work well in practice.
Thing is, if indeed you are running EGO, unless you have the authority turned way down, it will over-ride WUE and push toward the AFR set-point. As you mentioned.
Correct on Incorporate AFR.
Thing is, if indeed you are running EGO, unless you have the authority turned way down, it will over-ride WUE and push toward the AFR set-point. As you mentioned.
Correct on Incorporate AFR.

Reply
 0
0

0
04-16-2019, 06:28 PM
#102
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
I haven't set incorporate afr to on but I have set ego correction to kick in at 70F and honestly the rich when cold issue hasn't bugged me much since. Messing with dead-time and doing incorporate afr is gonna be put on the back burner till I have a solid weekend where I can get it all done at once.
Got the car on the dyno see the details here: https://www.miataturbo.net/build-thr...gt2560r-99851/
My biggest issue at this point is boost control. I read through the latest itt thread on it but still run into some odd issues.
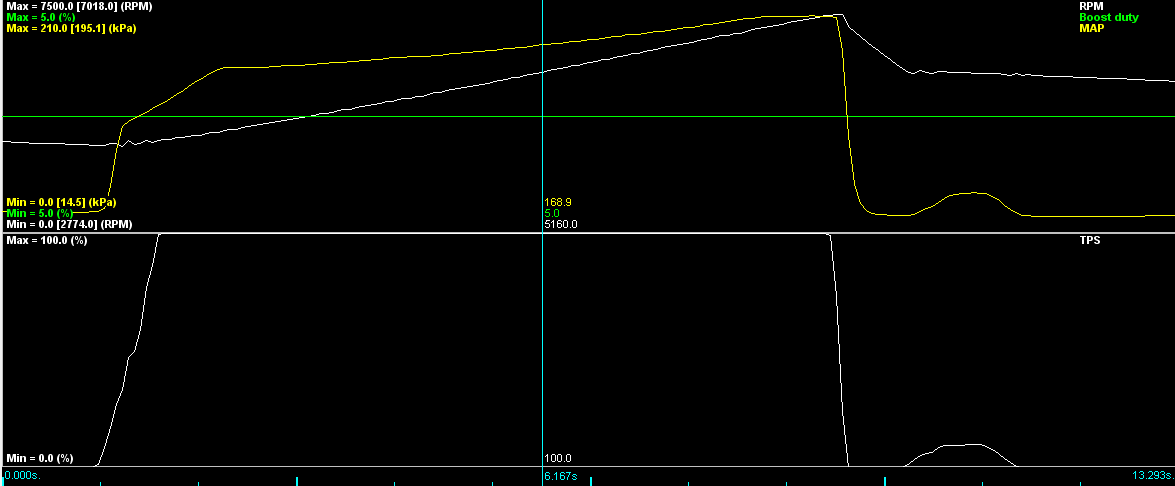
First screenshot: On the way to the dyno I would hit overboost when flatshifting and generally overshooting target of 180kpa. see the log: Overboost
The only change I made after this was I reduced the bias table quite a bit to the numbers this log provided me with. Those can be seen in the current tune attached.

Overboost
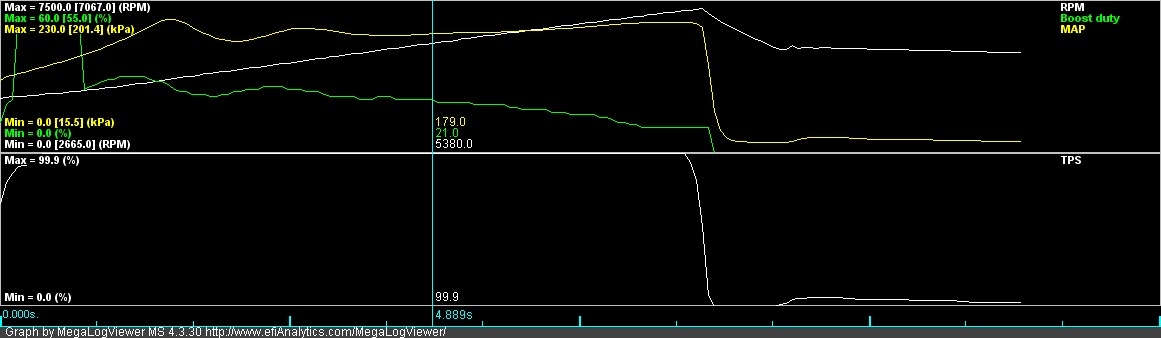
Second screenshot: One of the 3 dyno pulls from my log at the dyno. Boost slowly creeps to target and wants much higher bias numbers than the street pull did. I'm sure the extra bias needed could be due to less load on the dyno.

Dyno
Third screenshot: EBC settings from the dyno pull and everything was the same as the first log besides the bias table.

Boost
I'm assuming my biggest issue is the PID settings.
The manual states the proper way to tune the PID is:
The next step after setting up the target table and supporting settings is to adjust the slider for best performance. If the slider on its own does not give the results you hope for, you can go to advanced mode and tune the PID gains:
1. Set Integral and Differential Gains to 0% - This will let you focus on tuning the proportional gain.
2. Set Proportional gain to 100% and slowly lower - While tuning Proportional gain, higher numbers mean slower boost climb and lower final boost. For safety, start with a very high gain (100% should be sufficient). Find the RPM that typically spools quickly, and fully and quickly depress the accelerator. Note how much boost is reached. If boost overshoots the target dramatically, increase the Proportional gain. Otherwise, reduce the Proportional gain and try again. Do this until boost reaches the target with a small amount of overshoot.
3. Tune the Integral Gain - The next step after the target is reached consistently is to tune the Integral gain. Starting from the RPM used to tune the Proportional gain, fully depress the accelerator and watch the boost as the engine climbs through the RPM range. As the engine accelerates through the rev range, the boost will probably creep away from the target. Keep increasing the Integral gain until the controller adequately maintains the target with minimal oscillation. It may be necessary to increase the Proportional gain a bit after tuning the Integral gain since the two gains tend to counteract each other.
4. Tune the Derivative Gain - Increase the Derivative gain until the overshoot is minimized. Care must be taken when increasing the Derivative gain as too much Derivative gain can over-dampen the effects of the Proportional and Integral gains.
Has anyone used this method and had good results or is there other strategies?
I know I saw DNM was a fan of aggressive PID and basically no lower limit. Is this still the case and you're having good luck?
Current tune and logs attached. Thanks for reading!
Got the car on the dyno see the details here: https://www.miataturbo.net/build-thr...gt2560r-99851/
My biggest issue at this point is boost control. I read through the latest itt thread on it but still run into some odd issues.
First screenshot: On the way to the dyno I would hit overboost when flatshifting and generally overshooting target of 180kpa. see the log: Overboost
The only change I made after this was I reduced the bias table quite a bit to the numbers this log provided me with. Those can be seen in the current tune attached.
Overboost
Second screenshot: One of the 3 dyno pulls from my log at the dyno. Boost slowly creeps to target and wants much higher bias numbers than the street pull did. I'm sure the extra bias needed could be due to less load on the dyno.
Dyno
Third screenshot: EBC settings from the dyno pull and everything was the same as the first log besides the bias table.
Boost
I'm assuming my biggest issue is the PID settings.
The manual states the proper way to tune the PID is:
The next step after setting up the target table and supporting settings is to adjust the slider for best performance. If the slider on its own does not give the results you hope for, you can go to advanced mode and tune the PID gains:
1. Set Integral and Differential Gains to 0% - This will let you focus on tuning the proportional gain.
2. Set Proportional gain to 100% and slowly lower - While tuning Proportional gain, higher numbers mean slower boost climb and lower final boost. For safety, start with a very high gain (100% should be sufficient). Find the RPM that typically spools quickly, and fully and quickly depress the accelerator. Note how much boost is reached. If boost overshoots the target dramatically, increase the Proportional gain. Otherwise, reduce the Proportional gain and try again. Do this until boost reaches the target with a small amount of overshoot.
3. Tune the Integral Gain - The next step after the target is reached consistently is to tune the Integral gain. Starting from the RPM used to tune the Proportional gain, fully depress the accelerator and watch the boost as the engine climbs through the RPM range. As the engine accelerates through the rev range, the boost will probably creep away from the target. Keep increasing the Integral gain until the controller adequately maintains the target with minimal oscillation. It may be necessary to increase the Proportional gain a bit after tuning the Integral gain since the two gains tend to counteract each other.
4. Tune the Derivative Gain - Increase the Derivative gain until the overshoot is minimized. Care must be taken when increasing the Derivative gain as too much Derivative gain can over-dampen the effects of the Proportional and Integral gains.
Has anyone used this method and had good results or is there other strategies?
I know I saw DNM was a fan of aggressive PID and basically no lower limit. Is this still the case and you're having good luck?
Current tune and logs attached. Thanks for reading!
Reply
0
0
04-16-2019, 06:55 PM
#103
Retired Mech Design Engr

iTrader: (3)
Join Date: Jan 2013
Location: Seneca, SC
Posts: 5,009
Total Cats: 856
Funny you should ask. I upgraded to 1.5.1, with no adverse issues. I was sad to find that Limp Mode still does not enforce the lower boost limit, as 1.4.X had not.
CLIdle engagement is great and I have not been able to fool it.
But, to your question. I had stopped using EBC when I had some clutch slippage. However, I accidentally turned it on when I was verifying all of my settings (as FW Update). Extra boost was great, and the slippage seems gone????? Anyway, to shorten the story; tomorrow I will take some logs. Maybe I'll look into the PID parameters with SD logging (or does that need 1.5.X beta?)
I think I found the reverse Proportional to not be backwards as that instructions states. Rather this PID is like all other in MS3, Higher P is more P.
Realize I have a tiny turbo, so my PID needs to be fast. Also, people kept talking about not getting control, hence my willingness to go aggressive.
Yes, no Lower Limit Delta, which means I have keyed in "200". So PID control begins when I first hit throttle, and target is way higher than actual.
The result of that is lots of P. This is then tamed with lots of D. Thus, my settings:
Slider = 470
P = 190
I = 60
D = 140
Note: scale is 0 - 200 for some strange reason.
I will run some stuff tomorrow and see if my settings still get good results. Likely they will, because I think I did most of my EBC tuning at about these air temps. So, a biased test (no pun intended).
Of course, if the clutch starts slipping again, I won't get good msi.
CLIdle engagement is great and I have not been able to fool it.
But, to your question. I had stopped using EBC when I had some clutch slippage. However, I accidentally turned it on when I was verifying all of my settings (as FW Update). Extra boost was great, and the slippage seems gone????? Anyway, to shorten the story; tomorrow I will take some logs. Maybe I'll look into the PID parameters with SD logging (or does that need 1.5.X beta?)
I think I found the reverse Proportional to not be backwards as that instructions states. Rather this PID is like all other in MS3, Higher P is more P.
Realize I have a tiny turbo, so my PID needs to be fast. Also, people kept talking about not getting control, hence my willingness to go aggressive.
Yes, no Lower Limit Delta, which means I have keyed in "200". So PID control begins when I first hit throttle, and target is way higher than actual.
The result of that is lots of P. This is then tamed with lots of D. Thus, my settings:
Slider = 470
P = 190
I = 60
D = 140
Note: scale is 0 - 200 for some strange reason.
I will run some stuff tomorrow and see if my settings still get good results. Likely they will, because I think I did most of my EBC tuning at about these air temps. So, a biased test (no pun intended).
Of course, if the clutch starts slipping again, I won't get good msi.
Reply
0
0
04-16-2019, 07:32 PM
#104
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Yeah, CL idle has been pretty good for me too in 1.5.1 haven't had the car stall on me once since I updated from 1.5,0.
1.5.1 does include the SD card data logging for PID but I haven't tried it myself.
Not getting control: with my non aggressive settings it barely pushed duty cycle to hit target at all as can be seen in my dyno log so I definitely need to be more agressive.
I will give settings like yours a try and mess with my current PID a bit and grab logs this week too.
It is too bad you're having clutch slip issues, seems like a lot of members have been having issues recently When my FM1 clutch slipped I was shocked and I was super annoyed with it and no amount of adjustment helped for me. Hopefully your issue just stays vanished.
When my FM1 clutch slipped I was shocked and I was super annoyed with it and no amount of adjustment helped for me. Hopefully your issue just stays vanished.
1.5.1 does include the SD card data logging for PID but I haven't tried it myself.
Not getting control: with my non aggressive settings it barely pushed duty cycle to hit target at all as can be seen in my dyno log so I definitely need to be more agressive.
I will give settings like yours a try and mess with my current PID a bit and grab logs this week too.
It is too bad you're having clutch slip issues, seems like a lot of members have been having issues recently
When my FM1 clutch slipped I was shocked and I was super annoyed with it and no amount of adjustment helped for me. Hopefully your issue just stays vanished.
Reply
0
0
04-17-2019, 08:50 AM
#105
Retired Mech Design Engr
iTrader: (3)
Join Date: Jan 2013
Location: Seneca, SC
Posts: 5,009
Total Cats: 856
Quick note: Had massive overshoot this morning (no clutch slip). Hate it when overboost kicks in, but would hate it worse if it did not.
Had to turn slider down to 380. I don't know if sensitivity scale was changed by FW guys. I know they were discussing it. anyway. I only got 1 quick try after I made that change, so I won't know anything until this afternoon. I will also set up the logging (offline) at lunch, so the run home should have it going.
Had to turn slider down to 380. I don't know if sensitivity scale was changed by FW guys. I know they were discussing it. anyway. I only got 1 quick try after I made that change, so I won't know anything until this afternoon. I will also set up the logging (offline) at lunch, so the run home should have it going.
Reply
0
0
04-17-2019, 09:59 PM
#106
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Yeah, hitting over boost is always a crappy feeling, but its just doing its job. I remember reading about changes to sensitivity but I'm not sure when/if they ever made them. In to see logs if you got any.
Reply
0
0
04-18-2019, 04:05 AM
#107
Retired Mech Design Engr
iTrader: (3)
Join Date: Jan 2013
Location: Seneca, SC
Posts: 5,009
Total Cats: 856
Well, I ran some more, and logged the PID variables. There is definitely something very different in either the FW or the car. Max DC is called for in most conditions until MAP reaches Target. So, overshoot is inevitable. I tried changing the Lower Limit Delta from 200 to 99 and then 50, with no change.
Don't even try my parameters.
For science, I'm going back to 1.4.0 and see what happens.
Don't even try my parameters.
For science, I'm going back to 1.4.0 and see what happens.
Reply
0
0
04-18-2019, 08:52 AM
#108
Retired Mech Design Engr
iTrader: (3)
Join Date: Jan 2013
Location: Seneca, SC
Posts: 5,009
Total Cats: 856
I reverted to 1.4.0. EBC works wonderful, just like it did before.
It would appear that the sensitivity of EBC was increased substantially from 1.4.X to 1.5.1. I have no idea where to target parameters.
From a conceptual standpoint, I can say:
Don't utilize the Lower Limit Delta feature
Lots of P (fast action and follows bias table well)
Little I (Adjusts when ambient air makes bias table imperfect)
Good bit of D (prevents overshoot)
I set the bias table higher than actually needed when tuning if ambient air is cool. Vice versa if ambient is hot. That way the range of Integral can bring it in, as needed.
If you use the SD card PID parameter logging, you will get a feel for how quickly, and the total range of the Integral parameter.
I will not go back to 1.5.1 because they have not fixed any of the issues that I have with 1.4.X...
It would appear that the sensitivity of EBC was increased substantially from 1.4.X to 1.5.1. I have no idea where to target parameters.
From a conceptual standpoint, I can say:
Don't utilize the Lower Limit Delta feature
Lots of P (fast action and follows bias table well)
Little I (Adjusts when ambient air makes bias table imperfect)
Good bit of D (prevents overshoot)
I set the bias table higher than actually needed when tuning if ambient air is cool. Vice versa if ambient is hot. That way the range of Integral can bring it in, as needed.
If you use the SD card PID parameter logging, you will get a feel for how quickly, and the total range of the Integral parameter.
I will not go back to 1.5.1 because they have not fixed any of the issues that I have with 1.4.X...
- No lower boost limit during Limp Mode. They say it is in 1.4, but the code does not exist to implement it. They did not fix it, either.
- Funky Idle valve "taper" after start, that is really a sudden change at the CLI wait time. I did not work with 1.5 enough to find out if setting both to 3 seconds works, but I did notice that the taper was not a taper.
Reply
0
0
04-19-2019, 05:40 PM
#109
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Thank you for that insight. I will be going out tonight and it is about as cold as I will drive the car in so this should be a good time to tune ebc.
If it interests you the new 1.5.2 beta is apparently making EGO much better so it might be worth it to adjust to 1.5.1 now if you want those features when the next official release comes. If not I totally understand not fixing something if its not broken.
I wonder if this taper you talk about is what I notice sometimes after start right when my taper would be ending there is an abrupt shake in the car its so hard to explain it feels like for a split second the car hiccups really hard.
My plan for tonight:
Log pulls in open loop at 5,10,15,20,25 duty on the EBC
Make graphs for each duty cycyle of RPM vs MAP in excel since I am a peasant and dont have megalogviewer HD with the histogram/table generator.
Populate the bias tables with values I learn from those graphs and can trust are right so I'm not chasing my tail.
Then I'm gonna go back into closed loop, and see if I get adequate results in simple mode just using the slider. I'm going to try it first with lower limit delta to 100kpa if I cant get that to work I will experiment with lower.
If it interests you the new 1.5.2 beta is apparently making EGO much better so it might be worth it to adjust to 1.5.1 now if you want those features when the next official release comes. If not I totally understand not fixing something if its not broken.
I wonder if this taper you talk about is what I notice sometimes after start right when my taper would be ending there is an abrupt shake in the car its so hard to explain it feels like for a split second the car hiccups really hard.
My plan for tonight:
Log pulls in open loop at 5,10,15,20,25 duty on the EBC
Make graphs for each duty cycyle of RPM vs MAP in excel since I am a peasant and dont have megalogviewer HD with the histogram/table generator.
Populate the bias tables with values I learn from those graphs and can trust are right so I'm not chasing my tail.
Then I'm gonna go back into closed loop, and see if I get adequate results in simple mode just using the slider. I'm going to try it first with lower limit delta to 100kpa if I cant get that to work I will experiment with lower.
Reply
0
0
04-20-2019, 09:30 AM
#110
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
As promised I have data from last night. I'm getting pretty fed up with living in the city. I have to drive over an hour just to get anywhere remotely possibly to do clean 3000rpm-redline 3rd gear pulls and even then its so hit or miss. Spent like 3hrs last night getting all these logs and here is the result.
Boost Duty 5:
Boost Duty 5
Boost Duty 10:

Boost Duty 10
Boost Duty 15:

Boost Duty 15
Boost Duty 20:

Boost Duty 20
Boost Duty 25: Hits overboost

Boost Duty 25
Boost Duty 22 and 20: This is 22 below 5000rpm and 20 above

Boost Duty 22 and 20
All this to find my car creeps to 190ish kpa at redline when its this cold This is a new problem for me and the only thing it could be is the squaretop. I'm surprised by how much it creeps and thought it would make lest boost because it flows better. Is there something I am missing? I could hold like 8psi to redline with the VTCS. There are some washers on my waste gate to add pre-load so I could make a little more boost back in my voodoo2 days. I'm going to remove those today and see where it gets me.
Attached all the data-logs and later I will throw up the closed loop attempts. Breakfast now.
Boost Duty 5:
Boost Duty 5
Boost Duty 10:
Boost Duty 10
Boost Duty 15:
Boost Duty 15
Boost Duty 20:
Boost Duty 20
Boost Duty 25: Hits overboost
Boost Duty 25
Boost Duty 22 and 20: This is 22 below 5000rpm and 20 above
Boost Duty 22 and 20
All this to find my car creeps to 190ish kpa at redline when its this cold
This is a new problem for me and the only thing it could be is the squaretop. I'm surprised by how much it creeps and thought it would make lest boost because it flows better. Is there something I am missing? I could hold like 8psi to redline with the VTCS. There are some washers on my waste gate to add pre-load so I could make a little more boost back in my voodoo2 days. I'm going to remove those today and see where it gets me.Attached all the data-logs and later I will throw up the closed loop attempts. Breakfast now.
Reply
0
0
04-21-2019, 11:31 AM
#111
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Okay so here is what I ended up with when I transitioned to closed loop later that night.
Boost control bias table:

Boost Bias
100 sensitivity 100 delta: This was the first settings I tried and I went straight into over-boost, I would probably need way more sensitivity to use a big lower limit so I decided to just use a smaller limit like I had luck with in the past.

100 sensitivity 100 delta
50 sensitivity 35 delta:

50 sensitivity 35 delta
100 sensitivity 35 delta:
100 sensitivity 35 delta
150 sensitivity 35 delta:

150 sensitivity 35 delta
After all that I ended up with 75 sensitivity 30 delta:

75 sensitivity 30 delta
I think moving forward I'm going to set my target boost to 180kpa below 5000 rpm and 195kpa above 5000rpm this should keep torque low enough to save my rods but give me enough control to deal with the creep.
Also I think based off my results I will need to utilize advanced mode to improve the initial onset of boost so I don't get oscillations
Boost control bias table:
Boost Bias
100 sensitivity 100 delta: This was the first settings I tried and I went straight into over-boost, I would probably need way more sensitivity to use a big lower limit so I decided to just use a smaller limit like I had luck with in the past.
100 sensitivity 100 delta
50 sensitivity 35 delta:
50 sensitivity 35 delta
100 sensitivity 35 delta:
100 sensitivity 35 delta
150 sensitivity 35 delta:
150 sensitivity 35 delta
After all that I ended up with 75 sensitivity 30 delta:
75 sensitivity 30 delta
I think moving forward I'm going to set my target boost to 180kpa below 5000 rpm and 195kpa above 5000rpm this should keep torque low enough to save my rods but give me enough control to deal with the creep.
Also I think based off my results I will need to utilize advanced mode to improve the initial onset of boost so I don't get oscillations
Reply
0
0
04-25-2019, 06:07 PM
#112
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Gonna be hitting the drag strip tomorrow night for test and tune to finally get my EBC dialed. I cant believe I never thought of going to a drag strip for tuning yet.
This is my dyno graph and the log from that run shows these MAP numbers.
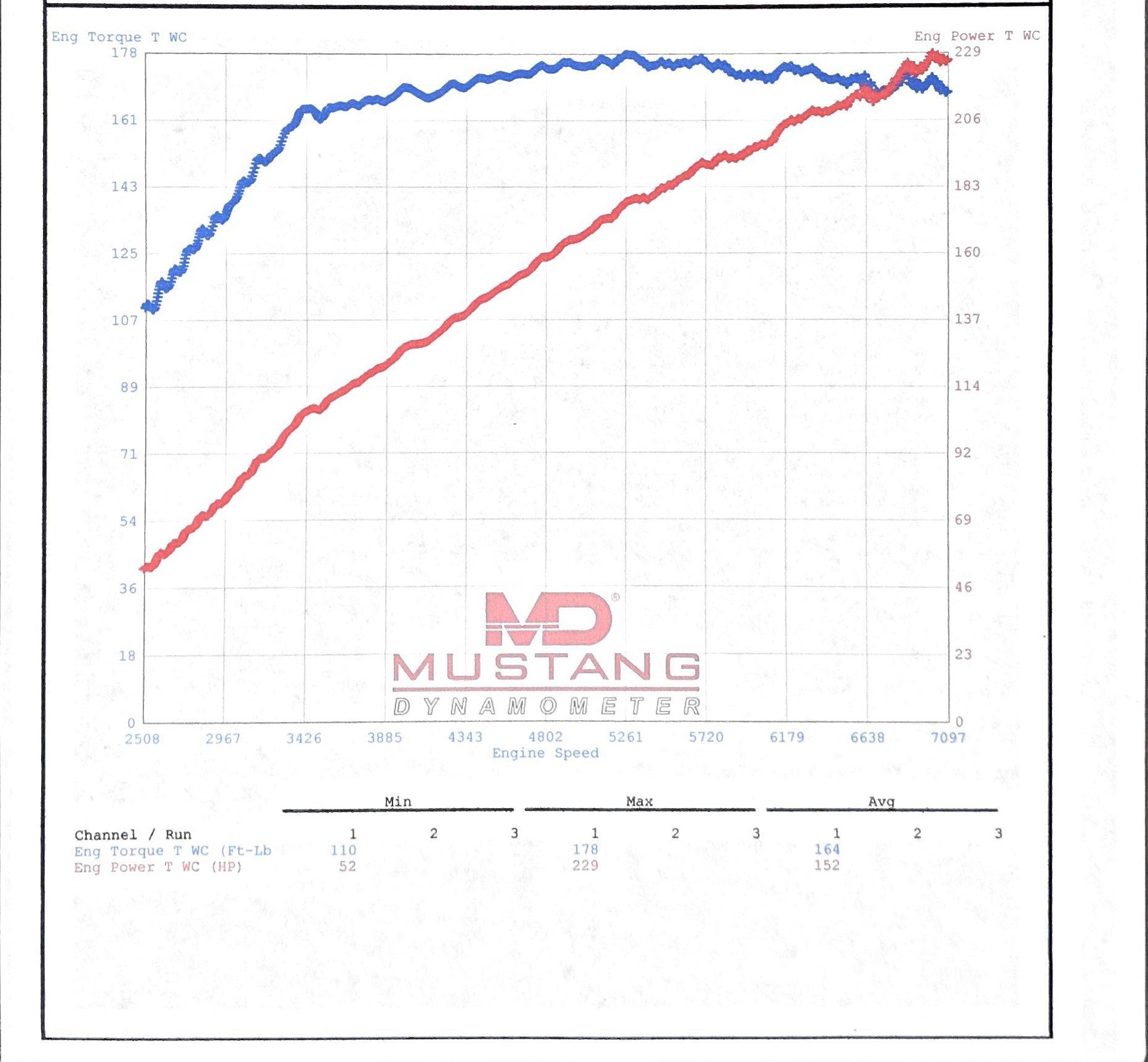 Dyno
Dyno
3000rpm 150kpa
3500rpm 165kpa
4000rpm 168kpa
4500rpm 172kpa
5000rpm 176kpa
5500rpm 179kpa
6000rpm 182kpa
6500rpm 186kpa
7000rpm 186kpa
When I'm on the street boost creeps to 190-195ish kpa above 5000rpm. I have 2 ideas.
A. Target 180kpa until 5000rpm then target 190kpa from 5000 to redline.
B. Target 190kpa the whole time.
I just dont want to make my rods bananas. Looking at similar setup dyno graphs it looks like anything under 14psi keeps torque in the safe range but maybe someone else can chime in on what they think the best plan is. For tuning simplicity I think 190kpa target the whole time would be the easiest, but is that asking too much from my stock rods?
This is my dyno graph and the log from that run shows these MAP numbers.
Dyno 3000rpm 150kpa
3500rpm 165kpa
4000rpm 168kpa
4500rpm 172kpa
5000rpm 176kpa
5500rpm 179kpa
6000rpm 182kpa
6500rpm 186kpa
7000rpm 186kpa
When I'm on the street boost creeps to 190-195ish kpa above 5000rpm. I have 2 ideas.
A. Target 180kpa until 5000rpm then target 190kpa from 5000 to redline.
B. Target 190kpa the whole time.
I just dont want to make my rods bananas. Looking at similar setup dyno graphs it looks like anything under 14psi keeps torque in the safe range but maybe someone else can chime in on what they think the best plan is. For tuning simplicity I think 190kpa target the whole time would be the easiest, but is that asking too much from my stock rods?
Reply
0
0
04-25-2019, 06:15 PM
#113
Retired Mech Design Engr
iTrader: (3)
Join Date: Jan 2013
Location: Seneca, SC
Posts: 5,009
Total Cats: 856
Target boosts that flattens torque from 3500RPM up to 6500RPM.
My max boost is at 3500, drops down a little 4500 - 5500, IIRC then peaks back up. Yields a flat torque at the level you feel comfortable with.
My max boost is at 3500, drops down a little 4500 - 5500, IIRC then peaks back up. Yields a flat torque at the level you feel comfortable with.
Reply
0
0
04-25-2019, 07:14 PM
#114
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Flat torque curve will definitely be the end goal.
I've been reviewing some pulls in virtual dyno and have an idea how to shape the boost curve but first I think I should focus on getting accurate and precise electronic boost control at a simple target and then move to that.
I've been reviewing some pulls in virtual dyno and have an idea how to shape the boost curve but first I think I should focus on getting accurate and precise electronic boost control at a simple target and then move to that.
Reply
0
0
04-25-2019, 11:05 PM
#117
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
I did not port the waste gate at all turbo is completely untouched from Garrett. I never had issues with boost creep until now, it must be a combination of the squaretop, and colder weather. Pre squaretop I have logs of me holding 180kpa to redline no problem.
Hopefully I get some good results tommorow. I went out tonight to do a shakedown and its starting to breakup in boost so I have to change plugs tomorrow. No surprise, these ones are old and have taken a beating from some tuning.
I think it will be hard to get enough passes to really dial in the PID but I will do my best.
Hopefully I get some good results tommorow. I went out tonight to do a shakedown and its starting to breakup in boost so I have to change plugs tomorrow. No surprise, these ones are old and have taken a beating from some tuning.
I think it will be hard to get enough passes to really dial in the PID but I will do my best.
Reply
0
0
04-27-2019, 11:01 PM
#118
Junior Member
Thread Starter
Join Date: Aug 2016
Location: Chicago
Posts: 208
Total Cats: 18
Buckle up because this is gonna be a long one.
Went to test and tune at the drags and was doing 3rd gear pulls to dial in ebc. Completed around 12 runs or something like that. Here is the progression and what I learned.
Run 1: Bias table from last post, 75 sensitivity, 25 delta.
As you can see the bias table wasn't enough to hit target so It kept dipping in and out of the lower limit when the bias table kicked in. Simple fix, the bias table needs to have higher numbers so it doesn't fall in and out of the lower limit.

Run 1
Run 2: Increased Bias table to what was required to hit targets, 75 sensitivity, 25 delta.
Overall not bad but bias table could use some work and as you can see at the end when I flat shifted into 4th I hit over boost.

Run 2
Run 3: Same eveything as run 2 but increased sensitivity to 150.
Was hoping increasing sensitivity would help avoid hitting boost cut when shifting into 4th but as you see it still happened.

Run 3
Run 4: I give the DNM method a try. Same bias table as 2&3, 100kpa delta, 300 sensitivity.
Was hoping this method with more overall control would fix the issue of hitting over-boost when I shift into 4th but as you see it just made me hit over-boost at the threshold. It targets max boost the whole time and doesn't drop the DC fast enough to not over-boost.

Run 4
Run 5: DNM method again. 100kpa delta, 300 sensitivity, 150P 20I 50D
Same issue. Targets max boost and wont drop DC until it is too late. I was hoping increasing "P" would help it follow the bias table more closely.
Run 5
Run 6: Gave up on having a larger lower limit and high sensitivity. This was 300 sensitivity, 30 delta, same bias table.
Was seeing if giving more control to closed loop with a little larger delta would help aid in the issue of over-boost when shifting. This ended in me hitting over-boost at the threshold. It seems the lower limit kicks in but boost is still not at target so closed loop control starts ramping up DC in the "integral windup" and it makes itself hit over-boost.

Run 6
Run 7: Same bias table, 25kpa lower limit, 150 sensitivity.
Still experimenting to fix the issue of over-boost on shift. This didn't fix it as you can see, but it is better than before.

Run 7
Run 8: same bias table, 35 delta, 75 sensitivity.
This helped avoid hitting over-boost on the shift but its still too close for comfort. I hit 208 kpa when I shifted and over-boost is 210. The lower sensitivity seems to help avoid integral windup when using a larger delta. The larger delta helps avoid peaking when shifting gears.

Run 8
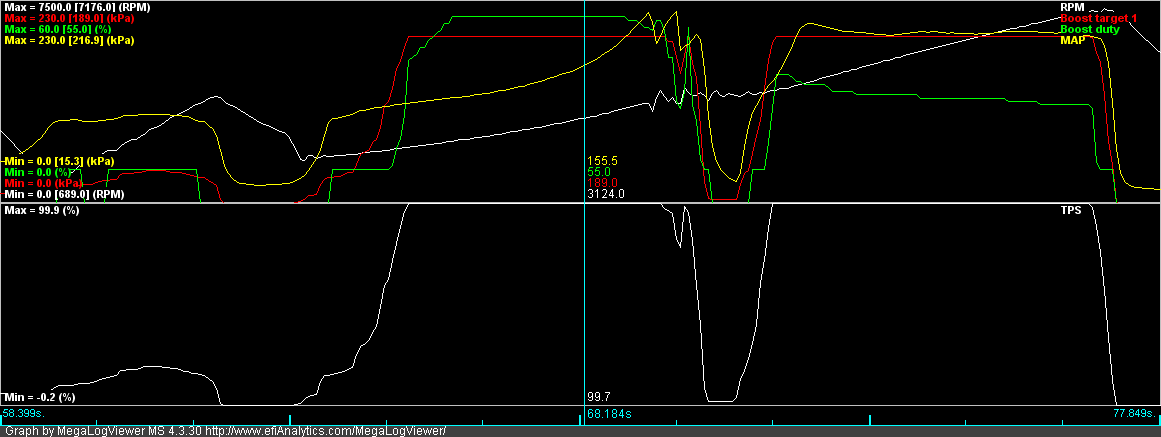
Run 9: same bias table, 35 delta, 140 sensitivity, 10P 15I 5D
This is what I ended the night on, this log shows a full run shifting from 3-4. Still hitting about 206kpa when shifting so no over-boost but too close for comfort. I was running out of time so I left it here and was honestly pretty happy with it.

Run 9
Summary of findings:
Lower-limit- as low as you can get it without boost spiking when hitting threshold or shifting gears.
Sensitivity- high sensitivity results in windup, at-least in basic mode. I had better luck with low sensitivity.
PID- Didn't get enough time messing with it.
I left pretty happy with my settings and finally feeling happy. Then my first pull on the highway was straight into over boost. Bias need to be MUCH lower for some reason. Nothing even changed, same weather, same elevation, I was literally 5 miles away from where these setting worked great. I think the airflow from the highway and cruising cooled the car off so it needed less DC to hit the same target.
Overall, I do not know what to do. I cant seem to figure out EBC. I will get it pretty good one night then conditions change and over-boost kicks in on every pull. I think an issue with my method is I need to give the closed loop more control and leave my bias table lower so its safe for all conditions. The problem with this is it always end in a windup situation where the DC then will inflate a ton to hit target and wont drop before over-boost kicks in. I'm very close to saying forget it and buying a MBC or just getting this: https://www.atpturbo.com/mm5/merchan...ory_Code=INWGA
In theory EBC has tons of pros: Faster spoolup, boost variable by throttle position, and the ability to compensate for elevation/weather. In reality, I cant get it to work and just want reliable and consistent boost at this point.
Went to test and tune at the drags and was doing 3rd gear pulls to dial in ebc. Completed around 12 runs or something like that. Here is the progression and what I learned.
Run 1: Bias table from last post, 75 sensitivity, 25 delta.
As you can see the bias table wasn't enough to hit target so It kept dipping in and out of the lower limit when the bias table kicked in. Simple fix, the bias table needs to have higher numbers so it doesn't fall in and out of the lower limit.
Run 1
Run 2: Increased Bias table to what was required to hit targets, 75 sensitivity, 25 delta.
Overall not bad but bias table could use some work and as you can see at the end when I flat shifted into 4th I hit over boost.
Run 2
Run 3: Same eveything as run 2 but increased sensitivity to 150.
Was hoping increasing sensitivity would help avoid hitting boost cut when shifting into 4th but as you see it still happened.
Run 3
Run 4: I give the DNM method a try. Same bias table as 2&3, 100kpa delta, 300 sensitivity.
Was hoping this method with more overall control would fix the issue of hitting over-boost when I shift into 4th but as you see it just made me hit over-boost at the threshold. It targets max boost the whole time and doesn't drop the DC fast enough to not over-boost.
Run 4
Run 5: DNM method again. 100kpa delta, 300 sensitivity, 150P 20I 50D
Same issue. Targets max boost and wont drop DC until it is too late. I was hoping increasing "P" would help it follow the bias table more closely.
Run 5
Run 6: Gave up on having a larger lower limit and high sensitivity. This was 300 sensitivity, 30 delta, same bias table.
Was seeing if giving more control to closed loop with a little larger delta would help aid in the issue of over-boost when shifting. This ended in me hitting over-boost at the threshold. It seems the lower limit kicks in but boost is still not at target so closed loop control starts ramping up DC in the "integral windup" and it makes itself hit over-boost.
Run 6
Run 7: Same bias table, 25kpa lower limit, 150 sensitivity.
Still experimenting to fix the issue of over-boost on shift. This didn't fix it as you can see, but it is better than before.
Run 7
Run 8: same bias table, 35 delta, 75 sensitivity.
This helped avoid hitting over-boost on the shift but its still too close for comfort. I hit 208 kpa when I shifted and over-boost is 210. The lower sensitivity seems to help avoid integral windup when using a larger delta. The larger delta helps avoid peaking when shifting gears.
Run 8
Run 9: same bias table, 35 delta, 140 sensitivity, 10P 15I 5D
This is what I ended the night on, this log shows a full run shifting from 3-4. Still hitting about 206kpa when shifting so no over-boost but too close for comfort. I was running out of time so I left it here and was honestly pretty happy with it.
Run 9
Summary of findings:
Lower-limit- as low as you can get it without boost spiking when hitting threshold or shifting gears.
Sensitivity- high sensitivity results in windup, at-least in basic mode. I had better luck with low sensitivity.
PID- Didn't get enough time messing with it.
I left pretty happy with my settings and finally feeling happy. Then my first pull on the highway was straight into over boost. Bias need to be MUCH lower for some reason. Nothing even changed, same weather, same elevation, I was literally 5 miles away from where these setting worked great. I think the airflow from the highway and cruising cooled the car off so it needed less DC to hit the same target.
Overall, I do not know what to do. I cant seem to figure out EBC. I will get it pretty good one night then conditions change and over-boost kicks in on every pull. I think an issue with my method is I need to give the closed loop more control and leave my bias table lower so its safe for all conditions. The problem with this is it always end in a windup situation where the DC then will inflate a ton to hit target and wont drop before over-boost kicks in. I'm very close to saying forget it and buying a MBC or just getting this: https://www.atpturbo.com/mm5/merchan...ory_Code=INWGA
In theory EBC has tons of pros: Faster spoolup, boost variable by throttle position, and the ability to compensate for elevation/weather. In reality, I cant get it to work and just want reliable and consistent boost at this point.
Last edited by BBro; 04-27-2019 at 11:06 PM. Reason: Spelling
Reply
0
0
04-28-2019, 12:43 AM
#119
Junior Member

Join Date: Apr 2018
Location: Central Texas
Posts: 356
Total Cats: 93

Coming from a purely controls perspective (e.g. I don't have first hand experience with EBC) and with a pretty simplistic view of the system (everything's a mass-spring-damper right?) I'll take a swing on spit-balling something...
- Without PID gains "scheduled" by engine speed, everything is going to be a huge compromise.
- First and foremost I'd recommend tuning feed-forward/bias table without the CL controller enabled (Ideal), or with just a very conservative P value set (do-able if MS won't let you do the other). Any CL controller will exhibit better reference (or set-point, pick your nomenclature) tracking with a good FF added, but the general concept is to make the "I" gain not have to work as hard to track the reference, therefore eliminating overshoot from the integral action growing super quickly when error is large and saturating the actuator, while also allowing for lower P values to achieve the same response time (adds stability). It's hard to tell if that reference tracking is from the PID or FF if both are enabled.
- End of the day outside disturbances (amb. air temp, humidity, altitude) and god knows how many other engine-state related variables (turbo oil feed temp, clt feed temp, WG flapper spring temp, what mood your car is in) make a more scientific modeling and controller design very very non-trivial. Use the FF to get in the general ballpark, but I wouldn't waste time trying to getting it Pa-perfect, as a simple bias table obviously cannot account for the variety of parameters at play.
- It also seems that where it matters most (higher RPM) the penalty for error in the FF setup is amplified. Another reason to use a lighter hand on the FF tune.
- Once FF can follow step input to within something like +/- (but hopefully minus) 20% of reference, the FF should make response action fast enough to not require a large P value (which will add to instability from disturbances). Set P to something conservative and then lower it a bit more. You can then add in I gain until you get the balance of reference tracking without error vs. overshoot to the same step input you want (again sounds like you want to err on the side of a bit of steady-state error and less overshoot). Once the I is tuned to the ballpark, you can add back a bit of P to get your response time closer to where you want it (same warning, going overzealous can lead to instabilities when disturbances come into play). I don't have the first hand experience with the sensor noise levels with this setup or the filtering implemented on the MS, but I'd definitely be weary adding heaps and gobs of D gain to start off with. PI is adequate for a huge number of applications, I'd start with the low hanging fruit.
- I'm not sure if there's any filtering set for the RPM value, but I'd make sure that's as stable as can be, erring towards low-pass, as "hand-tuned" PID controllers (or Z-N method, pick your poison) tend to err on the side of instability in the name of response and input disturbances (like the FF table jumping quickly between bins) can be killer.
- I think a Step-Input testing (roughly what you're doing when you flat shift) is the most sensible approach, but from my reading its better if you can reduce the number of variables changing. If you're most interested in EBC response at higher RPMs, I'd maybe try some tests (hopefully somewhere empty and straight) where you left foot break to try and keep vehicle speed more or less constant at partial throttle at a specific RPM (say 5k), then give it the beans to test EBC while minimizing the impact deltaRPM has on the controller+wastegate+turbine+engine system. If I'm not mistaken this is done in industry with either an engine dyno or a special braking trailer that will hold a constant speed. Or don't, hard to tell a hair-brained idea when you don't have first hand experience with the system.
- All said and done taking a simple view of the system (e.g. lets slap a PID on there) is a bit tough because from what I could find most literature reports wastegate actuators exhibiting significant non-linear dynamics in their behavior with respect to turbine power. PID control for this is never going to be perfect perfect, best to fall on the side of stability rather than chasing wicked-fast boost control response.
Anyway, just my uninformed informed 2cents. Attached a bit of light reading if you want to go into some slightly more technical methods of pulling a simple 2nd order model from the input/output data and using those model parameters to set base values for PID parameters. MS isn't quite as complex a controller, but happy to help with the sys ID portion (or a spare matlab license) if you decide you want to try and test some PID/FF values with a model and want to go down that big'ole rabbit hole.
Last edited by Spaceman Spiff; 04-28-2019 at 12:32 PM. Reason: why does the website add in so many spaces?
Reply
0
0
04-28-2019, 05:12 PM
#120
Junior Member

Join Date: Jan 2016
Location: Pittsburgh, PA
Posts: 154
Total Cats: 27
Sounds like you figured out a lot at the track then all went to ****, frustrating. Keeping the lower limit in your bias table sounds like the way to go for starters. As far as the DC building up and overshooting, it sounds like the wastegate cannot exactly expel enough gas to keep you on track. Dialing in PID will hopefully help you avoid overboosting.
Reply
0
0





