
EGO Settings


Thread Starter
Junior Member
Joined: Apr 2012
Posts: 109
Total Cats: -2
Couldn't find a post on EGO settings. Should we leave this as default (from the base map on a MSPNP)? Have a 1.6 with a pnp and not getting very good gas milage. Autotune has done its job (and if anyone is sick of my frustrated posts, i have several posts on here about my black exhaust crap!). I am going to recalibrate my Innovate LC-1 tomorrow, as i think i may have some incorrect AFR readings...
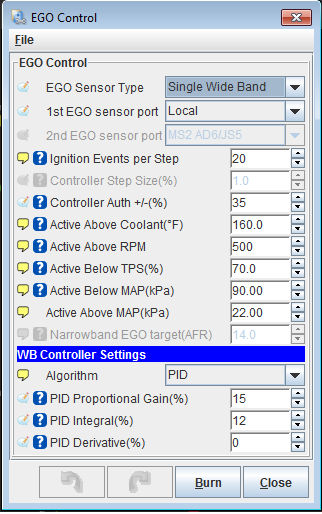
Here is what i have. I live at altitude, so i have it in open loop for my idle, as the temps and elevation changes drastically during my daily drive. I also have it running below 115Kpa since its only a little bit of boost. My main question is about the events per step, auth percentage, etc settings. I think my base map had 16, but read somewhere that 28 or 29 was good for a 4 cylinder.
Here is what i have. I live at altitude, so i have it in open loop for my idle, as the temps and elevation changes drastically during my daily drive. I also have it running below 115Kpa since its only a little bit of boost. My main question is about the events per step, auth percentage, etc settings. I think my base map had 16, but read somewhere that 28 or 29 was good for a 4 cylinder.
Reply
 0
0

0



Junior Member
Joined: Sep 2010
Posts: 80
Total Cats: 1
From: Denmark
- Tom
Reply
0
0
Joined: Jun 2006
Posts: 29,085
Total Cats: 375
From: Republic of Dallas
You're right, but when it's 107*f outside and you're parked in traffic with 205*f IATs in some sort of outer ring of "super heat soak hell", you may need more than 8% in traffic.
Reply
0
0

This is something that I need to do some research to understand better. I am not utilizing this function on my MS. Does this setting help with small +/- .2 fluctuations of the AFR under constant load?
Reply
0
0
Joined: Jun 2006
Posts: 29,085
Total Cats: 375
From: Republic of Dallas
http://msextra.com/doc/ms3/Idle_Control.html
The following basic steps should be used for tuning the PID controller gains:
Zero all the gains - Set all the gains to 0%. This is so that the effects of tuning the I-term in the next step are not confused with the effects of any other setting.
Tune the Integral (I) gain -
The Integral gain is the only term that controls whether the code actually reaches its target. Higher values for Integral gain will result in the code being able to get closer to the commanded target; however, a value that is too high will result in oscillation. The easiest way to determine a good value for the I term is to keep increasing it until oscillation occurs, then slightly lower it. If this value is increased to 200% without reaching a point where oscillation occurs, then the RPM with valve opened setting can be decreased as far as necessary, and the open duty/steps setting and closed duty/steps setting can be made further apart to make the PID loop more sensitive.
Tune the Proportional (P) gain -
After tuning the I gain so that the RPM reaches the commanded target without oscillation, the P gain can be tuned. The best way to tune this is to set it as high as possible without getting any oscillation. After setting this, try turning on the air conditioning or other accessories that normally lower RPM or increase load. When these accessories are turned on, the RPM should dip a bit then recover (the valve position should increase significantly). Using longer PID ramp to target times can also make it so that when the PID algorithm engages, a higher P gain can be set without causing oscillation.
Tune the Derivative (D) gain -
For most users, use of the D gain should not be necessary. It substantially dampens the response of the loop.
The following basic steps should be used for tuning the PID controller gains:
Zero all the gains - Set all the gains to 0%. This is so that the effects of tuning the I-term in the next step are not confused with the effects of any other setting.
Tune the Integral (I) gain -
The Integral gain is the only term that controls whether the code actually reaches its target. Higher values for Integral gain will result in the code being able to get closer to the commanded target; however, a value that is too high will result in oscillation. The easiest way to determine a good value for the I term is to keep increasing it until oscillation occurs, then slightly lower it. If this value is increased to 200% without reaching a point where oscillation occurs, then the RPM with valve opened setting can be decreased as far as necessary, and the open duty/steps setting and closed duty/steps setting can be made further apart to make the PID loop more sensitive.
Tune the Proportional (P) gain -
After tuning the I gain so that the RPM reaches the commanded target without oscillation, the P gain can be tuned. The best way to tune this is to set it as high as possible without getting any oscillation. After setting this, try turning on the air conditioning or other accessories that normally lower RPM or increase load. When these accessories are turned on, the RPM should dip a bit then recover (the valve position should increase significantly). Using longer PID ramp to target times can also make it so that when the PID algorithm engages, a higher P gain can be set without causing oscillation.
Tune the Derivative (D) gain -
For most users, use of the D gain should not be necessary. It substantially dampens the response of the loop.
Reply
0
0
Joined: Jun 2006
Posts: 29,085
Total Cats: 375
From: Republic of Dallas
Reply
0
0

Thread
Thread Starter
Forum
Replies
Last Post
Zaphod
MEGAsquirt
47
Oct 26, 2018 11:00 PM
StratoBlue1109
Miata parts for sale/trade
21
Sep 30, 2018 01:09 PM
stoves
Suspension, Brakes, Drivetrain
5
Apr 21, 2016 03:00 PM







