
MTnet Builds Flying Machines: Failure Accomplished


Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
I am resurrecting this thread because it needs more updates, AND I want to build a Quad or Tricopter.
What are your thoughts or opinions on the KK2.0? I will *NOT* be soldering magnet wire to the legs on tiny *** ECU's. I just need some basic K.I.S.S. **** that actually works without weeks/months of study. I think my 6ch radio should be OK, not sure I need any more than that.
Also, holy **** on your motors. 1200KV + 10x4.5 props x4 something like 6lbs of thrust?? I'm looking at using 750KV motors
What are your thoughts or opinions on the KK2.0? I will *NOT* be soldering magnet wire to the legs on tiny *** ECU's. I just need some basic K.I.S.S. **** that actually works without weeks/months of study. I think my 6ch radio should be OK, not sure I need any more than that.
Also, holy **** on your motors. 1200KV + 10x4.5 props x4 something like 6lbs of thrust?? I'm looking at using 750KV motors
KK 2 is weak sauce. Go straight for something with MultiWii on it, like a CRIUS all-in-one or an APM 2.5
The magnet wire thing was just putting firmware on an ESC, not the control board. The control boards have headers on them for ICSP or USB.
If you get Multirotor specific ESCs you wont need to do that, but if you get a normal plane ESC you will need to do the firmware. Its not usually that hard.
I never ended up using these 10" props. I was told they would burn up the motors when used for lifting. 10" is only okay when being used with a plane. So Ive been using 8" props.
Heres some data on the motor/prop combo:
10"

8"

700g of thrust with an 8" prop is damn decent for how small and light these motors on.
Reply
 0
0

0

I'm basically doing this: The Tricopter V2.5 | RC Explorer
Open souce is **** and the APM 2.5+ is �ber~****, but its $180. That's literally almost the entire budget for this project. I have considered something like this for the completely autonomous operation in the future, but I need to get the basics down first. I'd not looked into MultiWii. Looks like the NanoWii & MicroWii hardware can be had for as little as $20-$35 and its got TONS of features. Something else to read about and I appreciate the recommendation! My hard budget for this entire thing is $200 and I'm trying to stick to that. Honestly, I've tried not to do too much independant reading on all the crazy options that are out there lest I get completely distracted and end up $500-$750 into another hobby. I'd rather have another set of 6ULs than a pile of RC parts
I'm flashing cheapass HobbyKing F20A plane ESCs with the SimonK firmware because I'm a cheapass and they have programming pads readily accessible. Easy-peasy. In fact, most of the parts I'm using are coming from HobbyKing via China because again, cheap and easy.
750KV with a 9" or 10" prop and an 3S lipoly should give me more than enough thrust for this endeavour. RCExplorer/David is running Hextronic DT750 & 10" on his build and they seem to work fine. I decided to go with the Turnigy D2836 due to availability issues on the DT750 and the inherent cheapness of the Hextronic product. I built a couple of the FliteTest swapables listed earlier in the thread and used the recommended Hextronic 24g outrunners and I'm not super impressed with the quality, but they get the job done. I was running them on 2S 500mAh packs and was not impressed. My 3S 500mAh packs showed up yesterday so I'll be trying again this afternoon with moar power! But I digress: the Turnigy seemed to be a bit nicer at that price point so I went with them.
Did you drop the cheddar for a UniLog or was that data scrounged off the web? Because that's superpimp.
Also, this guy is pretty damn funny/informative. He's using a KK2.0 and that setup and configuration almost looks too easy.
I like the idea of not having to lug a laptop around to program the stupid thing. I have enough computers in my life already.
Open souce is **** and the APM 2.5+ is �ber~****, but its $180. That's literally almost the entire budget for this project. I have considered something like this for the completely autonomous operation in the future, but I need to get the basics down first. I'd not looked into MultiWii. Looks like the NanoWii & MicroWii hardware can be had for as little as $20-$35 and its got TONS of features. Something else to read about and I appreciate the recommendation! My hard budget for this entire thing is $200 and I'm trying to stick to that. Honestly, I've tried not to do too much independant reading on all the crazy options that are out there lest I get completely distracted and end up $500-$750 into another hobby. I'd rather have another set of 6ULs than a pile of RC parts
I'm flashing cheapass HobbyKing F20A plane ESCs with the SimonK firmware because I'm a cheapass and they have programming pads readily accessible. Easy-peasy. In fact, most of the parts I'm using are coming from HobbyKing via China because again, cheap and easy.
750KV with a 9" or 10" prop and an 3S lipoly should give me more than enough thrust for this endeavour. RCExplorer/David is running Hextronic DT750 & 10" on his build and they seem to work fine. I decided to go with the Turnigy D2836 due to availability issues on the DT750 and the inherent cheapness of the Hextronic product. I built a couple of the FliteTest swapables listed earlier in the thread and used the recommended Hextronic 24g outrunners and I'm not super impressed with the quality, but they get the job done. I was running them on 2S 500mAh packs and was not impressed. My 3S 500mAh packs showed up yesterday so I'll be trying again this afternoon with moar power! But I digress: the Turnigy seemed to be a bit nicer at that price point so I went with them.
Did you drop the cheddar for a UniLog or was that data scrounged off the web? Because that's superpimp.
Also, this guy is pretty damn funny/informative. He's using a KK2.0 and that setup and configuration almost looks too easy.
I like the idea of not having to lug a laptop around to program the stupid thing. I have enough computers in my life already.
Reply
0
0
Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
Im pretty familiar with RCExplorer, he does a lot of cool stuff.
10" on a DT750 is pretty under propped, unless youre on 4S. My buddy is running 11" on 3S and is planning on going to 12"
Im using a Chinese copy of the APM 2.5, so it was only ~$100. Just got a legit ArduFlyer case for it from diy drones for 5 bucks. Nice $75 savings there.
Pics coming soon.
EDIT:
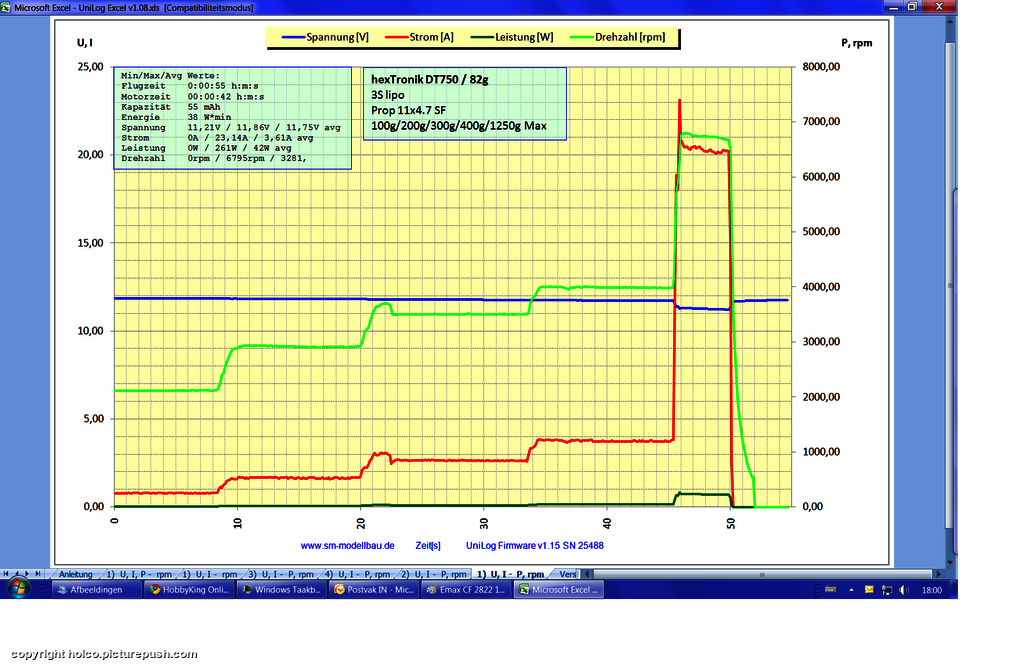
I found that data on RCGroups. Here is some DT750 data. As you can see, theyre a little heavy compared to how much thrust they make (compared to the EMAX motors), but they would make a little more thrust with another cell, or with a bigger prop.
10" on a DT750 is pretty under propped, unless youre on 4S. My buddy is running 11" on 3S and is planning on going to 12"
Im using a Chinese copy of the APM 2.5, so it was only ~$100. Just got a legit ArduFlyer case for it from diy drones for 5 bucks. Nice $75 savings there.
Pics coming soon.
EDIT:
I found that data on RCGroups. Here is some DT750 data. As you can see, theyre a little heavy compared to how much thrust they make (compared to the EMAX motors), but they would make a little more thrust with another cell, or with a bigger prop.
Last edited by Full_Tilt_Boogie; Apr 23, 2013 at 06:11 PM.
Reply
0
0

Nice! I'm in process of building an Arduino powered quad copter. Mine is going to be controlled from a computer through XBee although I'm hoping to build some automation into it as well. Going to try writing ALL of the software from scratch.
Reply
0
0
Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
^Thats awesome.
When I got into this I had aspirations to learn about control systems and writing PID feedback code, but I've barely gotten past the point of getting decent results with other peoples code.
MultiWii is built around Arduino, so its probably worth it to look at the code and see how it works.
When I got into this I had aspirations to learn about control systems and writing PID feedback code, but I've barely gotten past the point of getting decent results with other peoples code.
MultiWii is built around Arduino, so its probably worth it to look at the code and see how it works.
Reply
0
0
My wife is learning C++ and Assembly right now. The whole project is for her to practice real life coding  I'll be writing the control interface software in Python (so it's cross-platform compatible) and that's actually going to take care of navigation, etc. The only code on Arduino is going to be motor control (forward, back, left, right, up, down), auto-leveling (adjusting PWM output to motors), XBee communication, and hovering.
I'll be writing the control interface software in Python (so it's cross-platform compatible) and that's actually going to take care of navigation, etc. The only code on Arduino is going to be motor control (forward, back, left, right, up, down), auto-leveling (adjusting PWM output to motors), XBee communication, and hovering.
I'll be writing the control interface software in Python (so it's cross-platform compatible) and that's actually going to take care of navigation, etc. The only code on Arduino is going to be motor control (forward, back, left, right, up, down), auto-leveling (adjusting PWM output to motors), XBee communication, and hovering.
Reply
0
0

Skip the arduino and just use C + avrgcc + avrdude.
Designing any embedded project around an arduino is like trying to have sex and using the finger from a rubber glove as a condom. It feels bad man :(.
IMO C++ is horribly inappropriate for deep embedded development. It's not that there aren't a few good use cases for it (encapsulating common methods for hardware objects immediately comes to mind...but that's about it actually), but by and large it is more hassle than it's worth. You really need to be careful with what features of the language you are using else you might **** yourself in the foot (as my Russian friend who happens to be an embedded developer would say). Also, in general c++ compilers tend to produce code that is a fair bit larger than their c counterparts, which in an embedded system just plain sucks.
Designing any embedded project around an arduino is like trying to have sex and using the finger from a rubber glove as a condom. It feels bad man :(.
IMO C++ is horribly inappropriate for deep embedded development. It's not that there aren't a few good use cases for it (encapsulating common methods for hardware objects immediately comes to mind...but that's about it actually), but by and large it is more hassle than it's worth. You really need to be careful with what features of the language you are using else you might **** yourself in the foot (as my Russian friend who happens to be an embedded developer would say). Also, in general c++ compilers tend to produce code that is a fair bit larger than their c counterparts, which in an embedded system just plain sucks.
Reply
1
1
Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
Alright so I finally got around to taking some pics of the new setup, now with more lightness (790 grams minus battery) and a much more capable APM2 controller board (chinese copy FTW):


Reply
0
0

Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
I should get proper prop adapters, but theyre like half the price of my motors, so Im not going to bother.
Soon Ill be investing in some more legit motors that are designed for multirotor use, something like this:
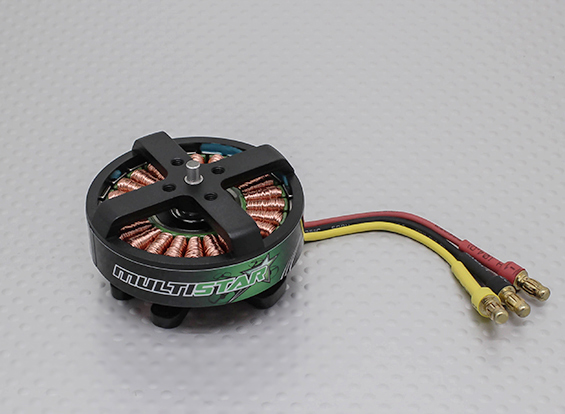

Soon Ill be investing in some more legit motors that are designed for multirotor use, something like this:
Reply
0
0
The first thing I noticed was the ziptie propsavers
 I'm totally trying this. Now ACE is going to wonder why I stopped buying out all their o-rings.
I'm totally trying this. Now ACE is going to wonder why I stopped buying out all their o-rings. 
y u no leik EMAX 2822 1200kV motors no mo? I was actually looking at going with something with a very similar size and kV range in my next go-round, so I'm curious as to why you are swapping out.
I'm guessing that comes later, after one gets the hang of throwing ones creation at the earth and missing. That's my plan anyway. I need to make a gopro analog out of wood or something so I can get used to the weight.

Reply
1
1
Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
Honestly, the emax 2822 motors are awesome. Theyre really cheap (the cheapest brushless motor I know of), theyre light, and quite powerful. I wont be retiring this set, and if I'd probably buy them again.
But, Id like something bigger, and Id like something that isnt a "bell type". Ive had these get loose from their mounts a few times and they end up twisting up the wires pretty badly. Plus, it would be nice to have a threaded shaft.
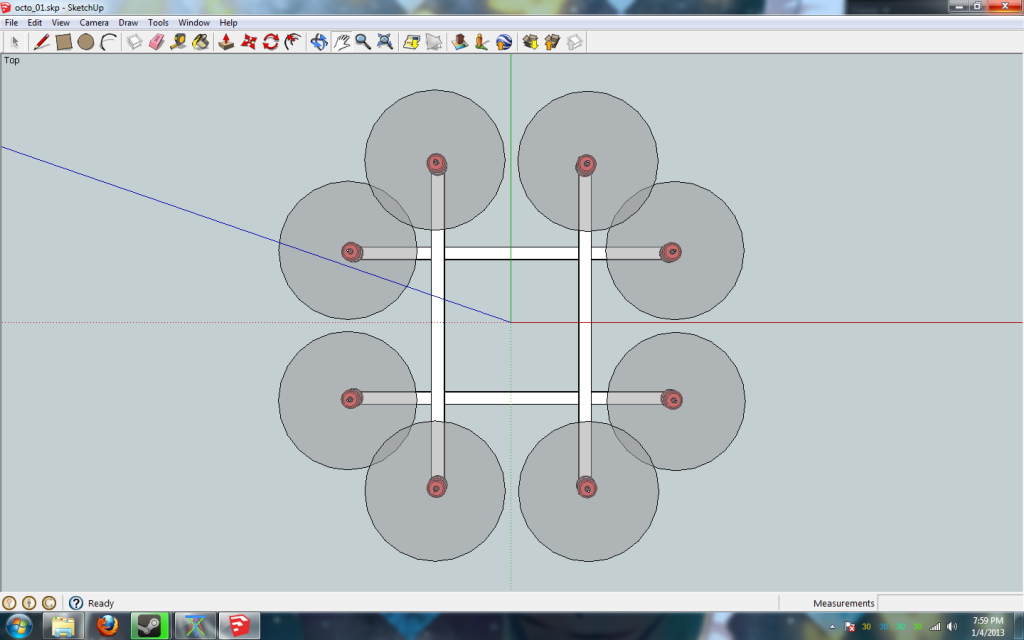
I even considered building an octocopter with these motors, which I might still consider trying (especially if I destroy this frame):
As for the camera. Im not baller enough to have a gopro, but I do have this awesome little keychain camera with a wide angle lens on it. Its an "808 #16 v2" with the 'D' lens. Roughly 45-50 bucks on ebay:

Heres a video showing its capability. pretty damn impressive for its size and price imo:
I tried making a little direct drive gimbal for mine but it was a total pile of ****:
Im going to make a better one at some point, but in the meantime I plan on just hard mounting it somewhere. So hopefully Ill have some cool video soon.
But, Id like something bigger, and Id like something that isnt a "bell type". Ive had these get loose from their mounts a few times and they end up twisting up the wires pretty badly. Plus, it would be nice to have a threaded shaft.
I even considered building an octocopter with these motors, which I might still consider trying (especially if I destroy this frame):


As for the camera. Im not baller enough to have a gopro, but I do have this awesome little keychain camera with a wide angle lens on it. Its an "808 #16 v2" with the 'D' lens. Roughly 45-50 bucks on ebay:
Heres a video showing its capability. pretty damn impressive for its size and price imo:
I tried making a little direct drive gimbal for mine but it was a total pile of ****:
Im going to make a better one at some point, but in the meantime I plan on just hard mounting it somewhere. So hopefully Ill have some cool video soon.
Reply
0
0
Ahh, the 808! I don't actually own a gopro yet, but I do plan to possess one sometime after June/July. I was going to try to find a solid used Hero2 after the 3 was released, but there was no mass migration and no used surplus to be had. I did a crapload of research on the 808 at one point. Dollar for dollar, they are badass as hell, I just haven't picked one up yet. The 808 #16 v2 + "D" looks ideal, especially in that video you posted. For $44 shipped I'm not going to argue.
Are those 9g HK servos on your gimble? Because looooooooooool
Are those 9g HK servos on your gimble? Because looooooooooool
Reply
0
0
I stayed at a Holiday Inn Express last night.
Are you sure the computer can compensate for the rotors not being equidistant from eachother? By placing them in a rectangle, I'd think it's going to cause them to work harder (ie, drain battery faster) due to the reduced moment arm.
Having the props that close to eachother is going to cause a wicked vortex to be formed as they pass eachother... true, they won't come very close on every rotation, but at the speeds they turn, you may achieve a state where they're in sync for long enough to set up some nasty rotor vortices where you actually cause a significant portion of the rotor to lose lift.
Oh... and do you really need the skids?
Are you sure the computer can compensate for the rotors not being equidistant from eachother? By placing them in a rectangle, I'd think it's going to cause them to work harder (ie, drain battery faster) due to the reduced moment arm.
Having the props that close to eachother is going to cause a wicked vortex to be formed as they pass eachother... true, they won't come very close on every rotation, but at the speeds they turn, you may achieve a state where they're in sync for long enough to set up some nasty rotor vortices where you actually cause a significant portion of the rotor to lose lift.
Oh... and do you really need the skids?
Reply
0
0
Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
Yes, they are total ****. Direct-drive is bad enough already, but with those servos it goes from bad to hilarious.
It shouldnt really matter. It will have a larger "arm" long ways, so it will be more responsive side to side (aeleron) than it will be front to back (elevator), but these can be tuned individually to make sure there isnt any kind of oscillation that would wear the battery down.
I assume youre talking about the octocopter with the overlapping props?
I can imagine there would be some weirdness there, and it would probably b bad for efficiency, but it would be nice to make it that much more compact.
The current setup has quite a bit of space between props, Im not sure how much they effect eachother if at all.
I wanted to raise it up a little to keep it out of the grass, and thats a very light and cheap pre-built solution.
Its kinda nice being able to land with some forward momentum without digging in too.
Having the props that close to eachother is going to cause a wicked vortex to be formed as they pass eachother... true, they won't come very close on every rotation, but at the speeds they turn, you may achieve a state where they're in sync for long enough to set up some nasty rotor vortices where you actually cause a significant portion of the rotor to lose lift.
I can imagine there would be some weirdness there, and it would probably b bad for efficiency, but it would be nice to make it that much more compact.
The current setup has quite a bit of space between props, Im not sure how much they effect eachother if at all.
Oh... and do you really need the skids?
Its kinda nice being able to land with some forward momentum without digging in too.
Reply
0
0
This is why old guys are awesome:
$1.28/ft & free shipping: Thera Band Blue Tube by The Foot Theraband Resistance Band Yoga Authentic | eBay For when you run out of zip-ties
$1.28/ft & free shipping: Thera Band Blue Tube by The Foot Theraband Resistance Band Yoga Authentic | eBay For when you run out of zip-ties
Reply
0
0





