
MTnet Builds Flying Machines: Failure Accomplished


Awesome, thanks for the pics and such!
I find it interesting that everyone seems to be going to 4S for FPV. Are the efficiency curves on low KV motors & 4S that much better than on 3S? I mean, these guys are talking about "28:30 minutes with NX-4008 motors, 10�4.7 props, and 6600mah 4s LiPos" @ 1.5kg AUW and that's god damn outrageous.
I find it interesting that everyone seems to be going to 4S for FPV. Are the efficiency curves on low KV motors & 4S that much better than on 3S? I mean, these guys are talking about "28:30 minutes with NX-4008 motors, 10�4.7 props, and 6600mah 4s LiPos" @ 1.5kg AUW and that's god damn outrageous.
Reply
 0
0

0

Awesome, thanks for the pics and such!
I find it interesting that everyone seems to be going to 4S for FPV. Are the efficiency curves on low KV motors & 4S that much better than on 3S? I mean, these guys are talking about "28:30 minutes with NX-4008 motors, 10�4.7 props, and 6600mah 4s LiPos" @ 1.5kg AUW and that's god damn outrageous.
I find it interesting that everyone seems to be going to 4S for FPV. Are the efficiency curves on low KV motors & 4S that much better than on 3S? I mean, these guys are talking about "28:30 minutes with NX-4008 motors, 10�4.7 props, and 6600mah 4s LiPos" @ 1.5kg AUW and that's god damn outrageous.
Reply
0
0


 I have a hard time with eCalc, it seems to add senseless amounts of weight for no particular reason.
I have a hard time with eCalc, it seems to add senseless amounts of weight for no particular reason.
Reply
0
0
It took me a while to figure that out. If you select "With Drive" in the top weight selection, what you put in the box is All Up Weight. If you select "Without Drive", the weight in that box is only chassis/ FC/ reciever/ etc.
Reply
0
0



Junior Member
Joined: Nov 2009
Posts: 459
Total Cats: 31
From: Jax Fl
Everyone pays their dues in blood at some point. A throttle safety switch is a great thing to have setup.
I'd love to see some videos of the vtails though I'm sad to see you abandon the tri setup. I'm still curious as to whats your issue. Maybe you could try out multiwii on it for mega cheap. I could even send you a basic calibration if you need.
I've dropped some of the weight on my micro and have begun building a micro brushed octo that I hope to run on multiwii as well using an arduino pro mini and dirt cheap ebay 10DOF IMU.
I'd love to see some videos of the vtails though I'm sad to see you abandon the tri setup. I'm still curious as to whats your issue. Maybe you could try out multiwii on it for mega cheap. I could even send you a basic calibration if you need.
I've dropped some of the weight on my micro and have begun building a micro brushed octo that I hope to run on multiwii as well using an arduino pro mini and dirt cheap ebay 10DOF IMU.
Reply
0
0

Had some free time this afternoon to work on a project.

I choose...

Unfortunately I seem to be short an ESC so it's back to cleaning the garage so I can work on the project below the quad
I choose...
Unfortunately I seem to be short an ESC so it's back to cleaning the garage so I can work on the project below the quad
Reply
0
0

Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
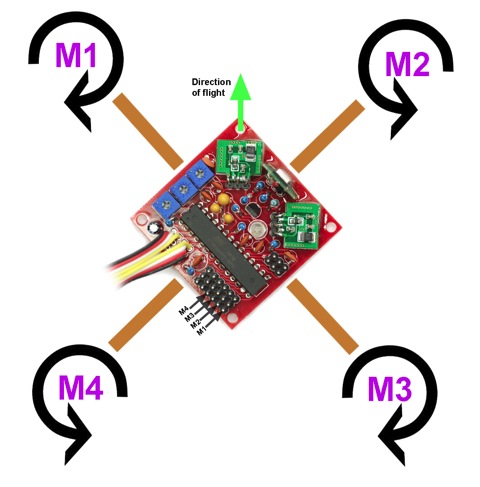
For all intensive purposes, you have to have an equal number of counter rotation props as you have normal rotation props. This is because of the torque created by the motors will cause the craft to spin (i.e. yaw), but if you have an equal amount of torque in both directions, it will not yaw.
The reason for them being across from each other is so that yaw can be controlled without causing it to lean side to side or front to back.
Earlier, I said 'for all intense purposes' because technically you can make it work without equal numbers of counter rotation props, or any counter rotation props for that matter. A Tricopter uses a tilting rear motor to control yaw, and also to compensate for its torque, which is why its always leaning a little bit even when the craft is not yaw'ing.
Furthermore, you can build a quadcopter with 4 normal rotation props if you twist 2 of the arms diagonally from each other in opposite directions. This will cancel out the torque of the whole system, and yaw can still be controlled in the typical way.
Both of these situations come at the cost of efficiency, plus added complexity.
Gesso,
It appears that you have your prop rotation backwards from left to right. You need to always have the leading edge of the front props swinging forward on the outside where the clear air is.
Reply
0
0

I finally got to do the postmortem on my big quad today. Looks like I bent one of the shafts on the D2836 750kv motors, so I'm down to 3. I stripped parts out of the quad to rebuild the Tri, but this time I'm on a KK2.0 as the APM seems to hate me with a passion.
I also finished my micro tri. Its super awesome, and it'll get better once I get the PI settings sorted out. I'm only a little excited

Thinking about a V-Tail and some FPV action... god help me...
Pics later.
Reply
0
0
Thread Starter
Elite Member
iTrader: (1)
Joined: May 2009
Posts: 5,155
Total Cats: 409
From: Jacksonville, FL
I havent flown in a couple weeks now, but I figured Id post an up to date photo.

I tried running longer wood booms without those aluminum motor mounts in hopes of reducing some jello, and also testing to see what longer arms feel like.
It was pretty much a failure, as the jello actually got worse. The RCGroups status quo is that aluminum is bad because it transmits vibration, but it seems that rigidity is a good thing, not a bad thing. The flex in the arms made the vibration worse, and after doing some searching on RCGroups I found others that have reported the same.
As for the length of the arms. It does not seem any more stable, just more sluggish in the sticks. I think the idea of the arms being long helping stability is a bit of a fallacy.
I may shorten the arms at some point, but I dont think Ill be going back to the aluminum. I like the weight reduction, and Im just going to take the added jello and work from that point towards eliminating it.
I have some vibration dampening rubber standoffs on the way and Ill be using them to make a revision to my frame.

I tried running longer wood booms without those aluminum motor mounts in hopes of reducing some jello, and also testing to see what longer arms feel like.
It was pretty much a failure, as the jello actually got worse. The RCGroups status quo is that aluminum is bad because it transmits vibration, but it seems that rigidity is a good thing, not a bad thing. The flex in the arms made the vibration worse, and after doing some searching on RCGroups I found others that have reported the same.
As for the length of the arms. It does not seem any more stable, just more sluggish in the sticks. I think the idea of the arms being long helping stability is a bit of a fallacy.
I may shorten the arms at some point, but I dont think Ill be going back to the aluminum. I like the weight reduction, and Im just going to take the added jello and work from that point towards eliminating it.
I have some vibration dampening rubber standoffs on the way and Ill be using them to make a revision to my frame.
Reply
0
0









